








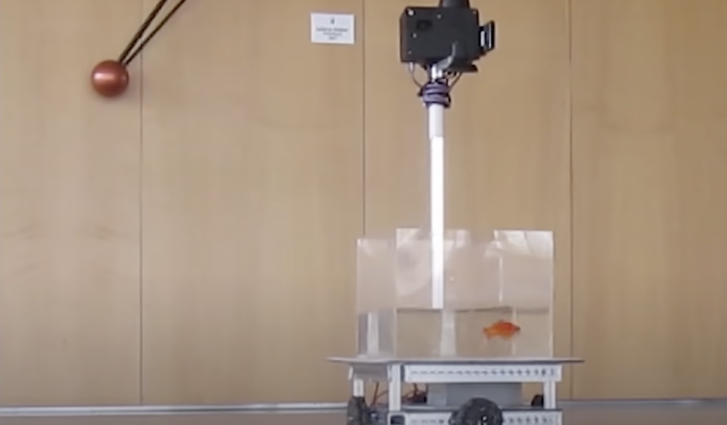
A kormánykereket ugyan nem forgatja, de a megfelelő eszközök segítségével képes volt magát eljuttatni A-ból B-be.
A hal által működtetett FOV elnevezésű jármű LiDAR, azaz fény- és távolságérzékelő szenzorokat használt arra, hogy feltérképezze annak mozgását a járműre erősített akváriumban – így amelyik irányba a hal elkezdett úszni, a jármű is abba az irányba indult el. Az aranyhal feladata az volt, hogy egy szoba adott pontjából sikeresen elvezesse a járművet egy másikba, melyet egy rózsaszín pont jelölt – ha ezt sikeresen teljesítette, jutalmat kapott.
A tanulmányt Shachar Givon doktorandusz és Matan Samina mesterszakos hallgató végezte Ohad Ben-Shahar és Ronen Segev professzorok mellett. A kutatásról szóló összefoglalójukban a szerzők elmondták:
A halaknak azt a feladatot adták, hogy »vezessék« a FOV-ot egy vizuális célpont felé a földi környezetben, amely a tartály falain keresztül megfigyelhető volt. Mint azt a kutatás is bizonyítja, a halak valóban képesek voltak a járművet működtetni, felfedezni az új környezetet, és elérni a célpontot a kiindulási ponttól függetlenül, miközben elkerülték a zsákutcákat, és korrigálták a helymeghatározási pontatlanságokat – fogalmaztak, majd hozzátették, hogy azt is megfigyelték, hogy a fény megtörik a vízen keresztül, de ez nem akadályozta meg a halakat abban, hogy a célpont felé navigáljanak.

